
Neuroevolution - The Introduction
I recently came across a really mind blowing video which is shown below.
This made me go right to the crux of the concept field behind it – Neuroevolution. Maybe you haven’t heard of neuroevolution in the midst of all the excitement over deep learning, but it has been the subject of study for a small, enthusiastic research community for decades. Lately this topic has been gathering a lot of attention as people have begun realizing its potential.
Put simply, neuroevolution is a subfield of artificial intelligence (AI) and machine learning (ML) . The concept of neuroevolution consists of triggering an evolutionary process similar to the one that led to the development of our brain inside a computer. In other words, neuroevolution seeks to develop neural networks through evolutionary algorithms.

The architecture of our brain is exceedingly powerful. After all, that is the basis of human intelligence,which means, that the evolution of the human brain is the only known natural process in the universe producing a highly intelligent system. The goal of neuroevolution is to trigger a similar evolutionary process inside a computer. In this manner, neuroevolution is the only branch of AI with an actual proof of concept: the brain did evolve, so we know that is one way to produce intelligence.
The core idea of neuroevolution is simple: it’s essentially just breeding by utilizing the concepts of biological evolution. But beyond that, things get a lot more interesting. I’m talking about an algorithm called NeuroEvolution of Augmenting Topologies (NEAT) which is a widely used algorithm in neuroevolution and has become popular within a very short span of time.
This algorithm went viral in a video called MarI/O where a network was developed that was capable of completing the first level of super mario (refer to the video below).
As per Wikipedia, NeuroEvolution of Augmenting Topologies (NEAT) is a genetic algorithm (GA) for the generation of evolving artificial neural networks a neuroevolution technique developed by Ken Stanley in 2002 while at The University of Texas at Austin.
A thorough treatment of the algorithm can be found in the paper Evolving Neural Networks through Augmenting Topologies by Kenneth O. Stanley and Risto Miikkulainen.
Before we delve deeper into NEAT it is very important that we get the basics right, ie Genetic algorithm. Genetic algorithm is an algorithm that helps in achieving genetic optimization, inspired by the process of natural selection that belongs to the larger class of evolutionary algorithms (EA). Genetic algorithms are commonly used to generate high-quality solutions to optimization and search problems by relying on bio-inspired operators such as selection, cross over (exchange of genetic information) and mutation to improve guesses.
Although they have no experience in the problem domain, they try things a human would never imagine trying. Thus, a person using a genetic algorithm may learn more about the problem space and potential solutions. This gives them the ability to make improvements to the algorithm in a virtuous cycle, hence giving them the ability to survive in the environments confronting them.
There is no doubt that the researchers posit that genetic algorithms are an effective method of training deep neural networks for reinforcement learning problems and that they outperform traditional RL based approaches in some domains.
The basic structure of a GA is as follows −
We start with an initial population (which may be generated at random or seeded by other heuristics) and select parents from this population for mating. Then we apply crossover and mutation operators on the parents to generate new off-springs in order to get nearer to the optimal result. Finally these off-springs replace the existing individuals in the population and this process repeats until the optimal target has been achieved. In this way genetic algorithms try to mimic the human evolution to some extent.

Keeping all the beginner audience in mind, I’ve shown a very simple implementation of genetic algorithm below in C++. In the code below, the aim is to guess a password by using the concept of genetic algorithm. We’ll start by randomly generating an initial sequence of letters as we don’t have any idea from where to start guessing and then mutate/change one random letter at a time until the sequence of letters is our target password “ActiveAI123”.
#include <iostream>
#include <stdlib.h>
#include <time.h>
#include <string.h>
using namespace std;
char geneSet[]="abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ!1234567890";
char target[]="ActiveAI123";
In the beginning of the code I’ve defined variables geneSet (generic set of letters to create genes from) and target (the password we wish the program to guess).
char* generate_parent(int length)
{
char* gene;
gene= (char*) calloc(length, sizeof(char));
for (int i=0; i<length; i++)
{
int RandIndex = rand() % strlen(geneSet);
gene[i]=geneSet[RandIndex];
}
gene[length]='\0';
return (gene);
}
Next I’ve created a function – generate_parent that generates a random string of letters from the variable geneSet. When this function is called, it takes the length of the target as argument. Here I’ve initialised a dynamic array (gene) that gets initialised to a random string of length equal to the target’s length.
int get_fitness(char guess[])
{ int sum=0;
for(int i=0; i<strlen(target); i++)
{
if(guess[i]==target[i])
{
sum++;
}
}
return(sum);
}
Next I’ve defined get_fitness function which will return the fitness value of the genetic algorithm. This provides the feedback to the engine to guide it towards solution. In this problem our fitness value is the total number of letters in the guess that matches the letter in the same position of the password.
We also need a way to produce a new guess by mutating the current one. In the following function definition, any one random index (RandIndex) is chosen from (0, len(parent)) and index (RandIndex_1) is chosen from (0, len(geneSet)). Then index (RandIndex) of the parent array gets equal to the element in index (RandIndex_1) of the geneSet.
void mutate(char parent[])
{
int RandIndex = rand() % strlen(parent);
int RandIndex_1 = rand() % strlen(geneSet);
parent[RandIndex]=geneSet[RandIndex_1];
}
In the main() function, I’ve initialised bestParent with the first generation and bestFitness with the fitness value of first generation. Here c is a counter initialised to 0 which gets increamented with creation of a new generation. In the while loop, after each mutation, the fitness of previous generation i.e.bestFitness is compared with the fitness of the mutated generation i.e. child. When childFitness becomes greater than or equal to the length of our desired target, the program will come out of the loop. Hence we will get the target.
int main()
{
srand (time(NULL));
int i, j;
char *bestParent = generate_parent(strlen(target)) ;
int bestFitness = get_fitness(bestParent);
char* child =(char*) calloc(strlen(target), sizeof(char));
int c=0;
while (1)
{
strcpy(child,bestParent);
mutate(child);
int childFitness = get_fitness(child);
c++;
cout<<"Generation_"<<c<<" "<<child<<endl;
if (bestFitness >= childFitness)
{
continue;
}
bestFitness = childFitness;
strcpy(bestParent,child);
if (bestFitness >= strlen(target))
{
break;
}
}
}
The output of the above implementation looks like this:
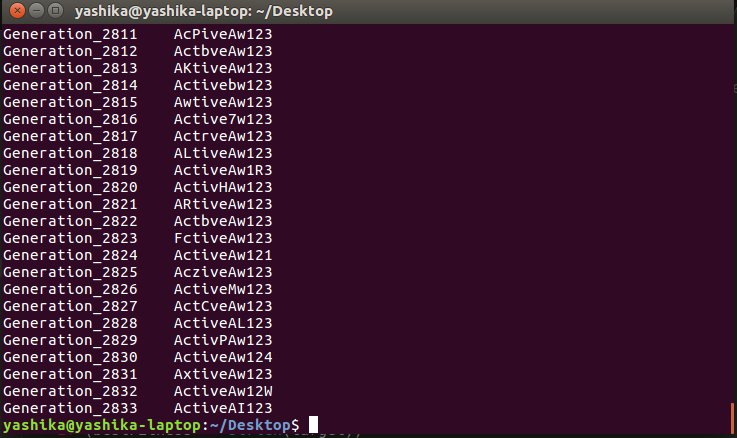
The above code gives a gist of how genetic algorithms uses the concepts of biological operators of evolution – selection, mutation etc. You can get this code in this repository. However it is a really small application. The one shown in the very beginning of this article is one of the incredible applications of the genetic algorithm which attempts to draw a faithful representation of Mona Lisa. That is Roger Alsing’s Mona Lisa problem, where the mentioned image has to be reproduced as faithfully as possible using only 50 triangles.
Another amazing implementation is:
In the above implementation, genetic algorithm is used to find out the appropriate path for snakes to reach their food. With each generation the probability of finding the optimal path increases. And finally they are able to find their way!
Here are few reference links that might help you gain more insights on the topic:
Written by Yashika Badaya for ActiveAI.